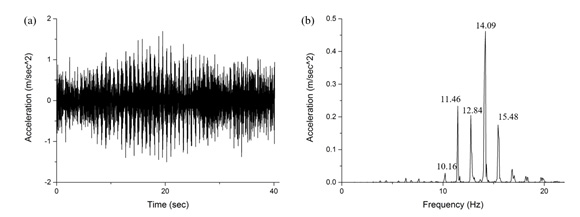
Structural Health Monitoring
The tensile force on the hanger cables of a suspension bridge is an important indicator of the structural health of the bridge. Tensile force estimation methods based on the measured frequency of the hanger cable have been widely used. These methods empirically pre-determinate the corresponding model order of the measured frequency. However, because of the uncertain flexural rigidity, this empirical order determination method not only plays a limited role in high-order frequencies, but also hinders the online cable force estimation. Therefore, we propose a new method to automatically identify the corresponding model order of the measured frequency, which is based on a Markov chain Monte Carlo (MCMC)-based Bayesian approach. It solves the limitation of empirical determination in the case of large flexural rigidity. The tensile force and the flexural rigidity of cables can be calculated simultaneously using the proposed method. The feasibility of the proposed method is validated via a numerical study involving a finite element model that considers the flexural rigidity and via field application to a suspension bridge.

Spherical Robot
Spherical robots are particularly useful on various types of terrain because of their efficient form of rolling locomotion, which makes them very maneuverable and allows them to recover easily after collisions. Another important advantage is that the robots can also be completely sealed. Fuel, gas or oil supply lines and power generation sources such as nuclear and thermal power plants and so forth require an extensive network of pipelines for various transportation purposes. Structural Health Monitoring (SHM) is immensely applicable in these fields to improve the lifespan of the pipelines and prevent catastrophic failures. Our group developed the SHM spherical robot to inspect the condition inside of pipelines.

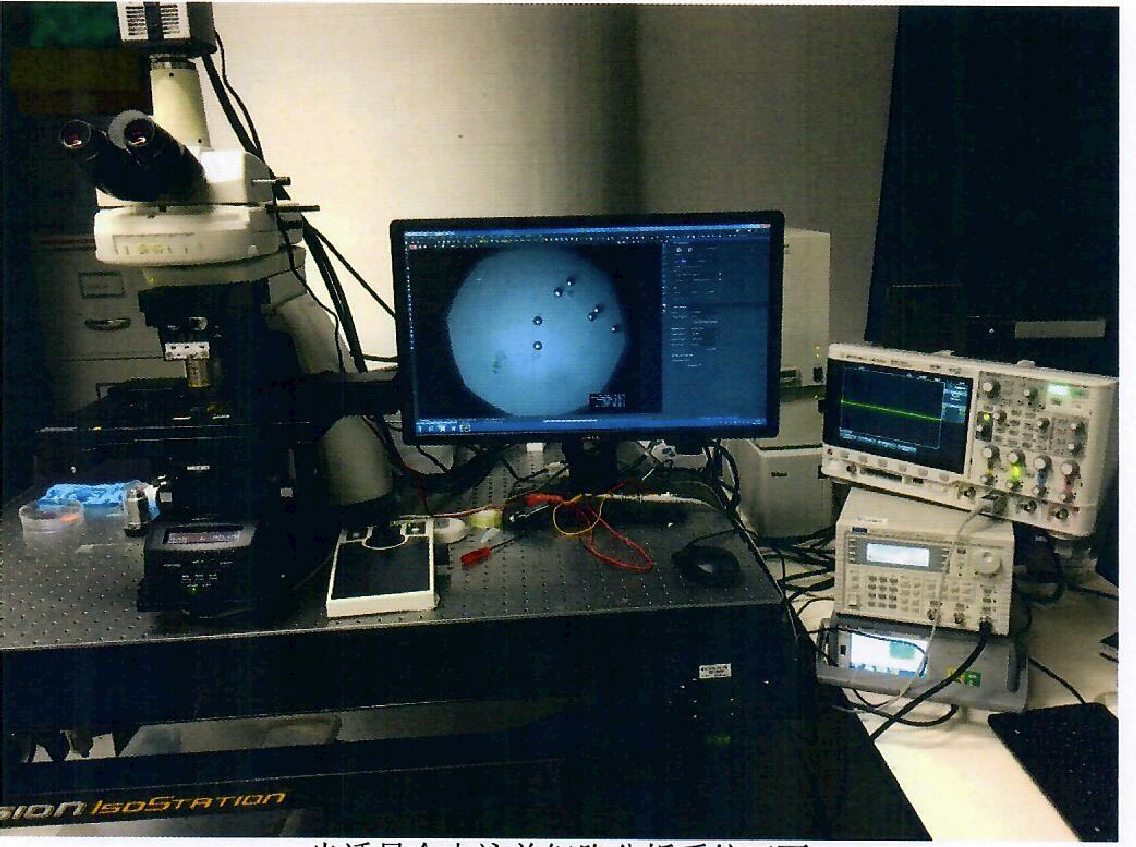
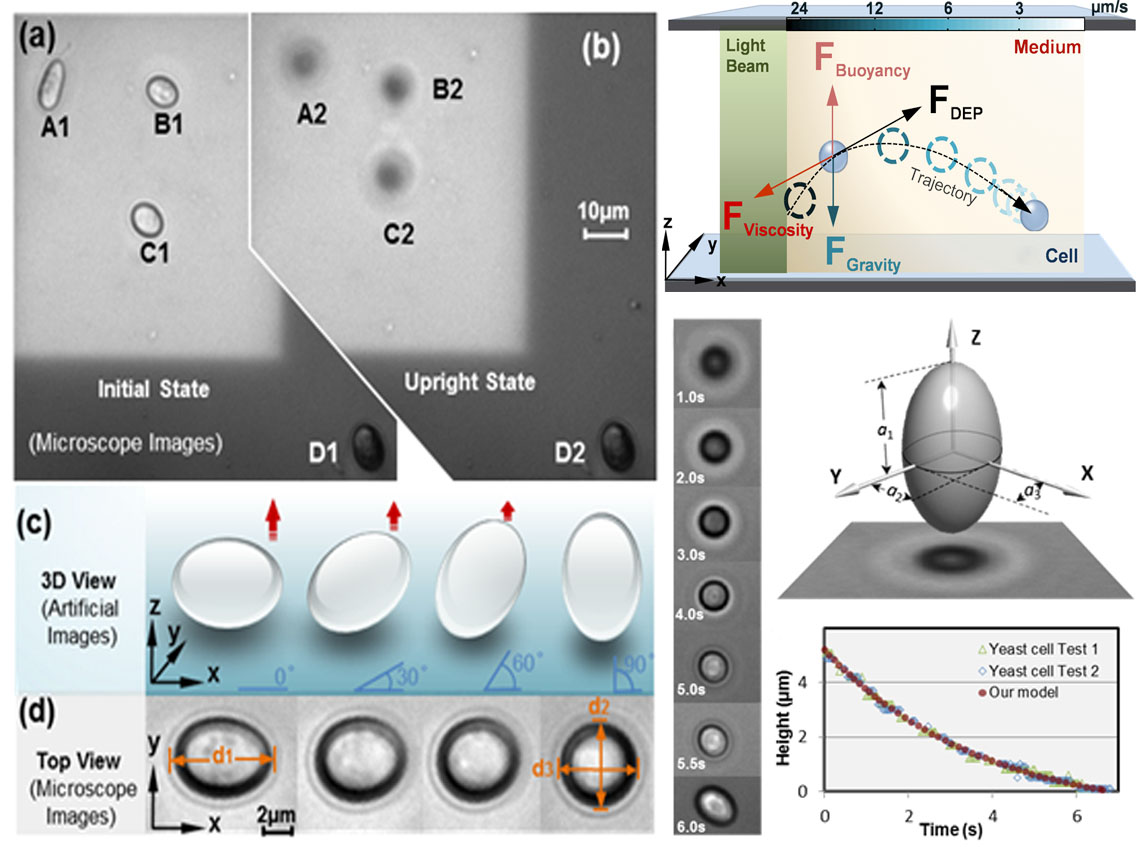
Single Cell Analysis
A single cell analysis makes it possible to discover heterogeneity and mechanisms not seen when studying a bulk population of cells. Our group has uniquely modeled the transient motion of biological cells by the first-order transient motion response using an optically-induced dielectrophotoresis (ODEP) and micro vision based platform. We demonstrated automated and effective micro vision methods based on the ODEP platform, which links a microfluidic system with an embedded ODEP chip, to rapidly analyze the cells transient motion response, and then calculate the single cell’s density and mass. Cell buoyant mass is one of the most important cell physical properties for cell growth, differentiation, apoptosis, and the cancer pathogenesis, invasion and metastasis.
Research and Development Grants
•
Deputy Project Coordinator, Hong Kong Innovation and Technology
Commission (ITC) Grant for "Eco-Cosmetic Intelligent Packaging System Based on Industrial IoT,"
HKD2,656,500, 2021-2022 (Project Code:
PRP/063/20FX).
•
Principal Investigator, Shenzhen Science and
Technology Research Grant for "Research on Near-field Optical Nano-scale 3D Imaging
and Measurement for Micro-nano Robot Manipulation,"
RMB300,000, 2020-2023 (Project Code:
JCYJ20190808181803703).
•
Principal Investigator, Shenzhen Science and
Technology Research Grant for "Application of Micro-nano
Operation Technology to the Acquisition of Intrinsic Information of Living
Single Cells in Physiological Environment," RMB490,000, 2018-2019 (Project Code:
JCYJ 20170818105431734).
•
Co-Investigator, National Key Scientific
Instrument and Equipment Development Project of the National Natural Science
Foundation of China (NSFC) Grant for "Cross-scale Synchronous
Micro-nano Observation and Operation System Based on Microsphere
Super-lens Technology," RMB1,400,000 for the subproject,
2018/01-2022/12 (Project Code: 61727811).
•
Principal Investigator, National Key Research
and Development Plan of the Ministry of Science and Technology of China Grant
for "Emergency Rescue and Reconnaissance Intelligent
Robotic System - Topic 4: Research on Development of Omnidirectional Spherical Detection
Robot and Multi-robot Coordination Technology,"
RMB 3,652,000, 2017/09-2020/07 (project code: 2016YFE0206200).
•
Principal Investigator, National Natural Science
Foundation of China (NSFC) Grant for "Physical Properties of in-vivo Unicellular
Microorganisms - A Nano-Electro-Mechanical Systems (NEMS) approach,"
RMB600,000, 2017-2020 (Project Code: 61673278).
•
Principal Investigator, Shenzhen Science and
Technology Research Grant for "Research in Large-scale Structural Health
Monitoring Based on Cyber-physical System Technology,"
RMB3,000,000, 2016-2018 (Project code: JCYJ 20150828104330541).
•
Principal Investigator, HK RGC Grant (GRF) for "Measurement
of Single Cell Mass Based on Transient Motion by Dynamic Dielectrophoretic
Field," HKD692,521, 2015-2017 (Project
code: CityU 11215614).
•
Principal Investigator, HK RGC Grant (GRF) for "3D
Cell Kinetics
Analyses for Cancer
Cell Identification
Based on Micro-vision," HKD645,500, 2014-2016 (Project code:
CityU 125513).
•
Principal Investigator, Shenzhen Science and
Technology Research Grant for "Research in Single Cell Density Measurement
Using Micro/nano Robotics on Optically-induced Electrokinetics Platform," RMB300,000, 2015-2016 (Project code:
JCYJ 20140618140504947).
•
Principal Investigator, Nanshan District of
Shenzhen Key Technologies Development Funding for "Optically-induced Dielectrophoresis Biochip for Cancer Cell Separation and Pharmacodynamics
Testing," RMB2,000,000, 2013-2015 (Project code: KC2013JSJS0003A).
•
Principal Investigator, Shenzhen Science and
Technology Research Grant for "Analysis of Human Motion Behavior Using Wireless
Body Area Network Technology," RMB100,000, 2012-2014 (Project code: JCYJ 20120618140504947).
•
Principal Investigator, CityU
Grants for "Automatic Cell Kinetic Analysis with Vision-based Optically-induced
Dielectrophoresis System," HKD200,000, 2012-2014 (Project
code: 7200298).
Sponsors